

作者:张浩 日期:2023年08月10日
近日,IEEE会刊《IEEE Transactions on Circuits and Systems II: Express Briefs》 (二区TOP,IF 4.4)报道了人工智能学院协同控制团队在多智能体系统安全控制方面的研究进展,相关成果以“Safety-Critical Model-Free Adaptive Iterative Learning Control for Multi-Agent Consensus Using Control Barrier Functions”为题在线发表。
本文针对未知多智能体系统在执行重复任务过程中的安全性问题,提出了一种新的迭代学习控制障碍函数。针对任务重复且模型动态参数不确定的多智能体系统,设计了一种数据驱动的一致性控制器。为了保证智能体在每次迭代中的输出安全性,提出了迭代域的安全关键控制。即,提出一种新的迭代学习控制障碍函数,结合提出的一致性控制律,对控制输出构造二次规划。当期望输出与安全边界发生冲突时,控制器可以优先考虑智能体的安全性。最后,设计了具有重复特性的多智能体系统来验证理论结果。
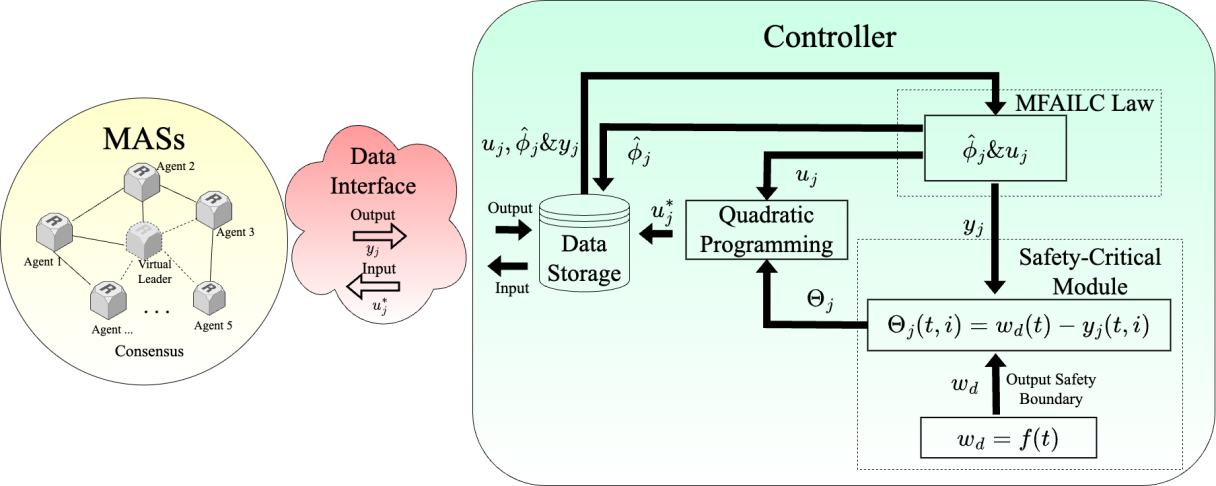
图1 算法框架
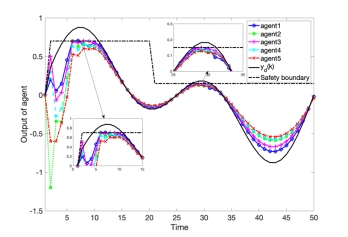
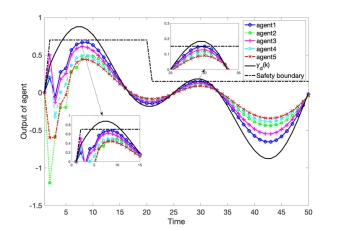
图2 不同迭代次数智能体输出
河南大学人工智能学院为该论文的第一单位,协同控制团队博士生闫帅明为第一作者,协同控制团队教授周毅为通讯作者。该研究工作受到国家自然科学基金项目的支持。
论文链接:10.1109/TCSII.2023.3300978



微信扫码关注
