

日期:2024年06月30日
近日,计算机科学领域国际顶级刊物《IEEE Transactions on Systems, Man, and Cybernetics: Systems》 (一区TOP,IF 8.6)报道了人工智能学院协同控制团队在多智能体系统协同控制方向的研究进展,相关成果以“Cucker-Smale Flocking Behavior for Multiagent Networks With Coopetition Interactions and Communication Delays”为题在线发表。
蜂拥行为是指在一定条件下,许多个体(比如蜜蜂、鸟群、鱼群等)在空间或时间上产生协同行为的现象。这种行为通常展现出一种集体智慧,使整个群体可以协调地做出特定的动作或决策,而不需要单个个体的中央指挥。蜂拥行为在自然界中非常常见,也在人工智能领域中被用作启发式算法和集群智能的研究基础。
本论文探讨了通信时延存在情况下的多智能体系统蜂拥控制问题,其中智能体之间同时存在合作和竞争关系。假设通信链路上的信息传输时延具有时变异构的特征,本论文通过设计关于智能体之间通信距离的非线性权重函数,利用无限超随机矩阵乘积收敛性方法,建立了智能体之间合作与竞争程度的代数条件,理论上证明了蜂拥动态模型的渐进收敛。最后,通过计算机仿真对理论结果进行了验证。
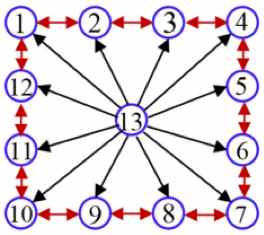
图1.智能体之间的通信网络,其中黑色和红色实线分别表示合作和竞争关系

图2.智能体的运动轨迹
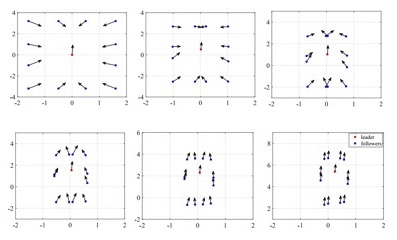
图3.智能体的运动轨迹
河南大学人工智能学院为该论文的第一单位,协同控制团队石磊教授为第一作者,协同控制团队教授周毅为通讯作者。该研究受到国家重点研发计划-国际合作重点专项项目、国家自然科学基金项目、河南省重点研发专项项目的支持。
论文链接:https://ieeexplore.ieee.org/document/10572007



微信扫码关注

