

日期:2025年03月12日
近日,自动化领域国际顶级刊物《IEEE Transactions on Cybernetics》(一区TOP,IF 9.4)报道了人工智能学院协同控制团队在多智能体系统协同控制方向的研究进展,相关成果以“Barycentric Coordinate-Based Distributed Localization for Wireless Sensor Networks Under False-Data-Injection Attacks”为题在线发表。
随着网络攻击的频率和规模的不断上升,传感器网络分布式定位系统面临着严峻的安全挑战。分布式定位技术在传感器网络中至关重要,因为它能够实时计算出各个传感器的位置信息,但其数据准确性与网络连接的稳定性密切相关。然而,在网络攻击威胁下,传感器网络的数据传输速度、可靠性以及存储容量都会受到严重影响,导致位置信息准确性和系统的稳定运行能力大大下降。因此,研究如何提高传感器网络分布式定位系统的抗网络攻击能力,并提升其位置信息的准确性和稳定性,具有重要的现实意义。这不仅能够保障传感器网络在工业、农业等领域的稳定运行,还能为解决复杂的网络安全问题奠定基础,推动传感器网络技术的发展和应用深化。
本文主要研究了虚假数据注入下的无线传感器网络分布式定位问题,其中攻击者随机破坏通信信道并注入虚假数据,导致传感器节点接收到的数据被编码。本文借助重心坐标表示,提出了一种基于检测保持策略的分布式迭代定位算法,该算法通过残差检测和通信加密来检测通信链路中的虚假数据。从理论上证明了在随机虚假数据注入攻击下,所提出的定位算法可以实现对传感器位置的精确收敛。最后,通过仿真实例证明了算法的性能。
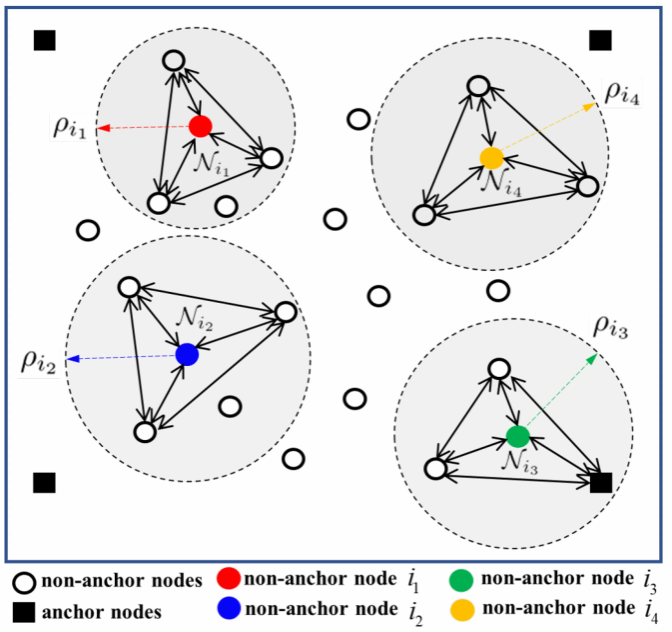
图1. 传感器节点部署与分布式通信

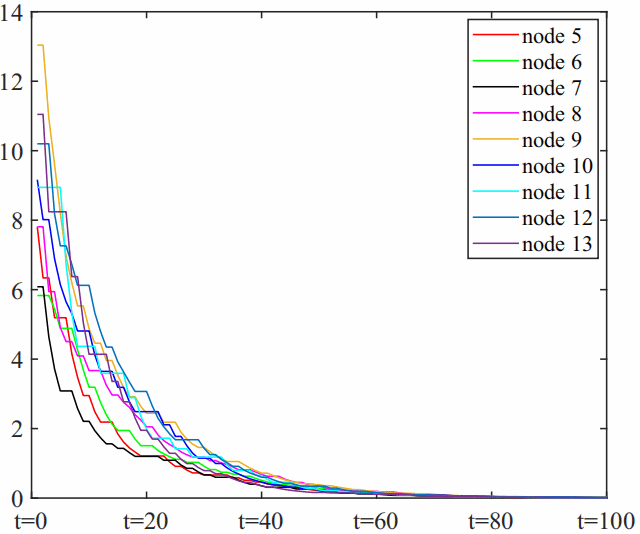
图2. 所提出分布式定位算法在虚假数据注入下的定位误差收敛轨迹
河南大学人工智能学院为该论文的第一单位,协同控制团队石磊教授为第一作者,协同控制团队周毅教授为通讯作者。该研究受到国家重点研发计划-国际合作重点专项项目、国家自然科学基金项目、河南省重点研发专项项目的支持。
论文链接:https://ieeexplore.ieee.org/abstract/document/10880471



微信扫码关注
