日期:2025年06月18日
近日,电气工程领域国际顶级刊物《IEEE Transactions on Industrial Informatics》(一区TOP,IF 11.7)接收了人工智能学院信息融合团队在机械臂故障诊断方向的研究进展,论文题目为“Neural Network–Based Reinforcement Iterative Learning Fault Estimation Scheme for Nonlinear Uncertain Manipulator Systems With Time-Delay”。
随着工业控制系统快速发展,多机械臂系统复杂性不断增加,同时,强耦合、随机扰动、非线性动态、参数不确定以及时滞等因素也日益凸显,导致故障估计方法在准确性、实时性和鲁棒性等方面面临诸多挑战。因此,如何提高复杂机械臂系统故障估计的快速性和准确性,具有重要的理论价值和工程意义。
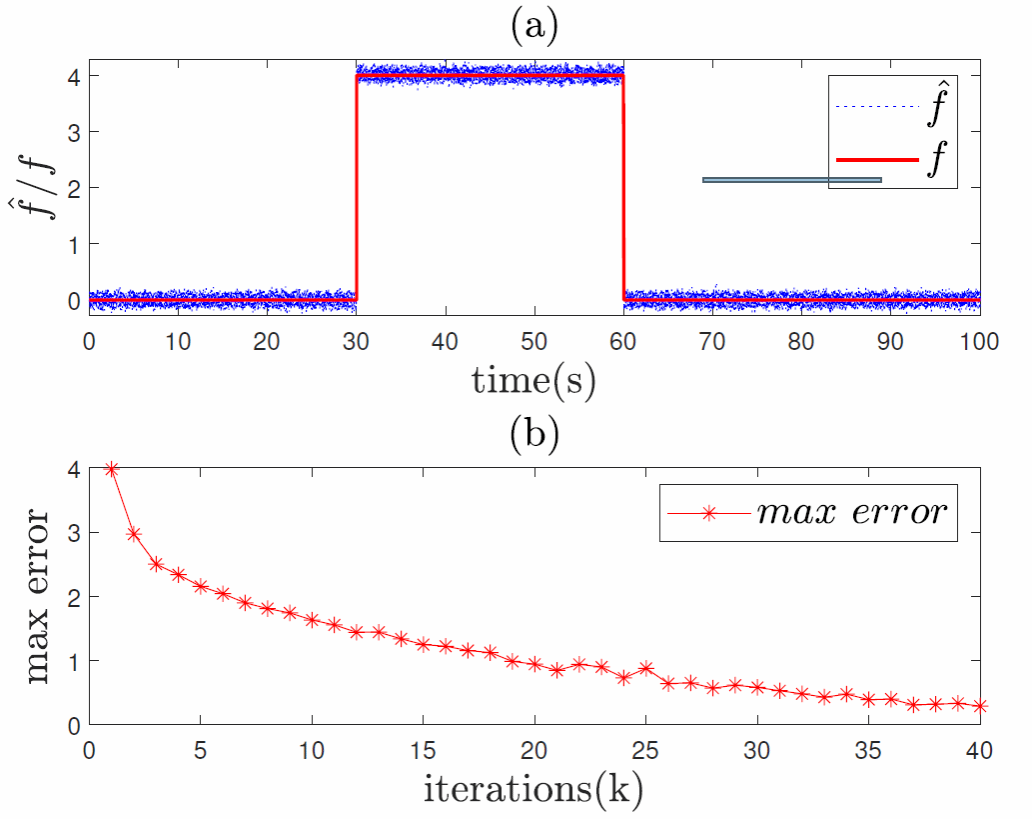
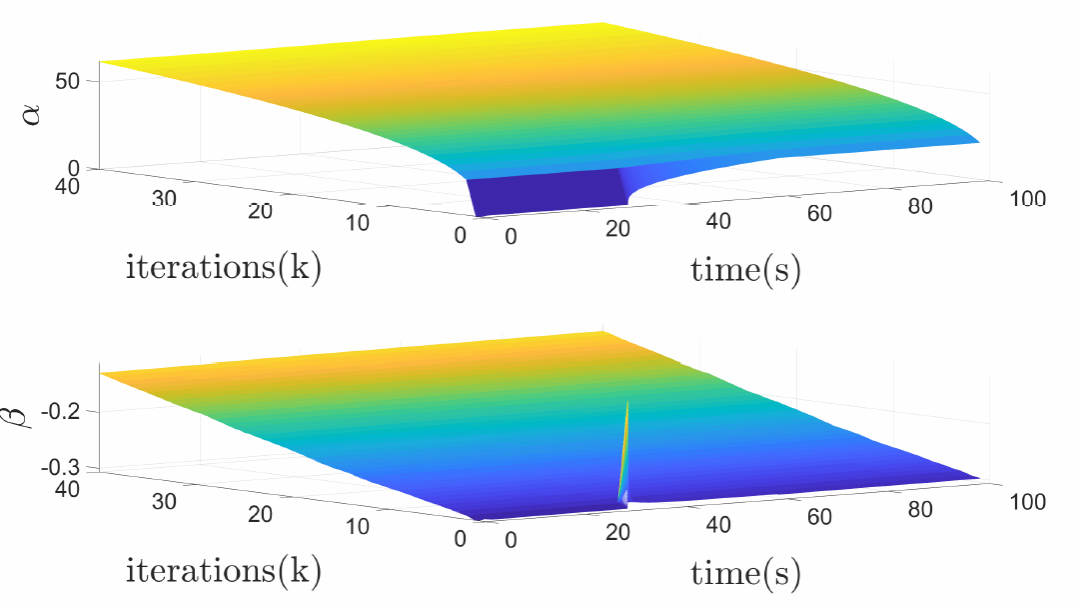
论文提出了一种基于Actor-Critic 神经网络的强化迭代学习鲁棒故障估计策略,以提升故障估计准确性和实时性。设计了自适应指数奖励函数的强化学习算法,以故障估计的速度和精度为优化目标,更新迭代学习的增益参数,实现故障估计的多目标优化。此外,在Lyapunov函数中考虑了状态时滞误差,基于  理论证明了故障估计的收敛性和鲁棒性,并且通过抑制迭代之间的故障变化率和外部扰动,有效地减少了超调量,提高了故障估计的快速性和准确性。
理论证明了故障估计的收敛性和鲁棒性,并且通过抑制迭代之间的故障变化率和外部扰动,有效地减少了超调量,提高了故障估计的快速性和准确性。
|
| ||||||||
图1 所提方法故障估计效果及迭代学习参数优化过程 | |||||||||
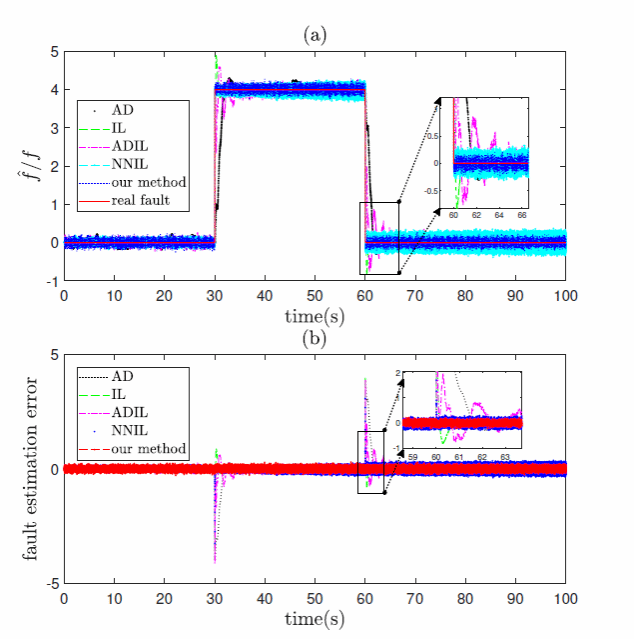
图2 不同故障估计方法对比图
本项工作主要由学院2021级博士研究生陈政权在侯彦东教授、钟麦英教授的指导下完成,为河南大学、山东科技大学、华北水利水电大学的联合研究成果,受到国家自然科学基金项目、河南省自然科学基金重点项目等的支持。
论文链接: https://ieeexplore.ieee.org/document/11033185



微信扫码关注