

日期:2024年08月06日
近日,智能交通领域国际顶级刊物《IEEE Transactions on Intelligent Transportation Systems》(一区TOP,五年IF 8.3)报道了人工智能学院协同控制团队在车联网多模态运动预测方向的研究进展,相关成果以“I2T: From Intention Decoupling to Vehicular Trajectory Prediction Based on Prioriformer Networks”为题在Web of Science正式发表。
可靠的车辆运动预测是自动驾驶汽车决策执行和安全驾驶的重要参考,其关键挑战在于驾驶模式的不确定性。车辆的未来运动预测应具有多模态运动分布,以考虑驾驶员可能做出的所有选择。每种模式都需要利用地图语义和观察到的特征进行推理,以确保其在未来一段时间内可以采取合理的运动轨迹。由于预测空间呈指数级增长,运动轨迹的长期及多模态预测意义重大。
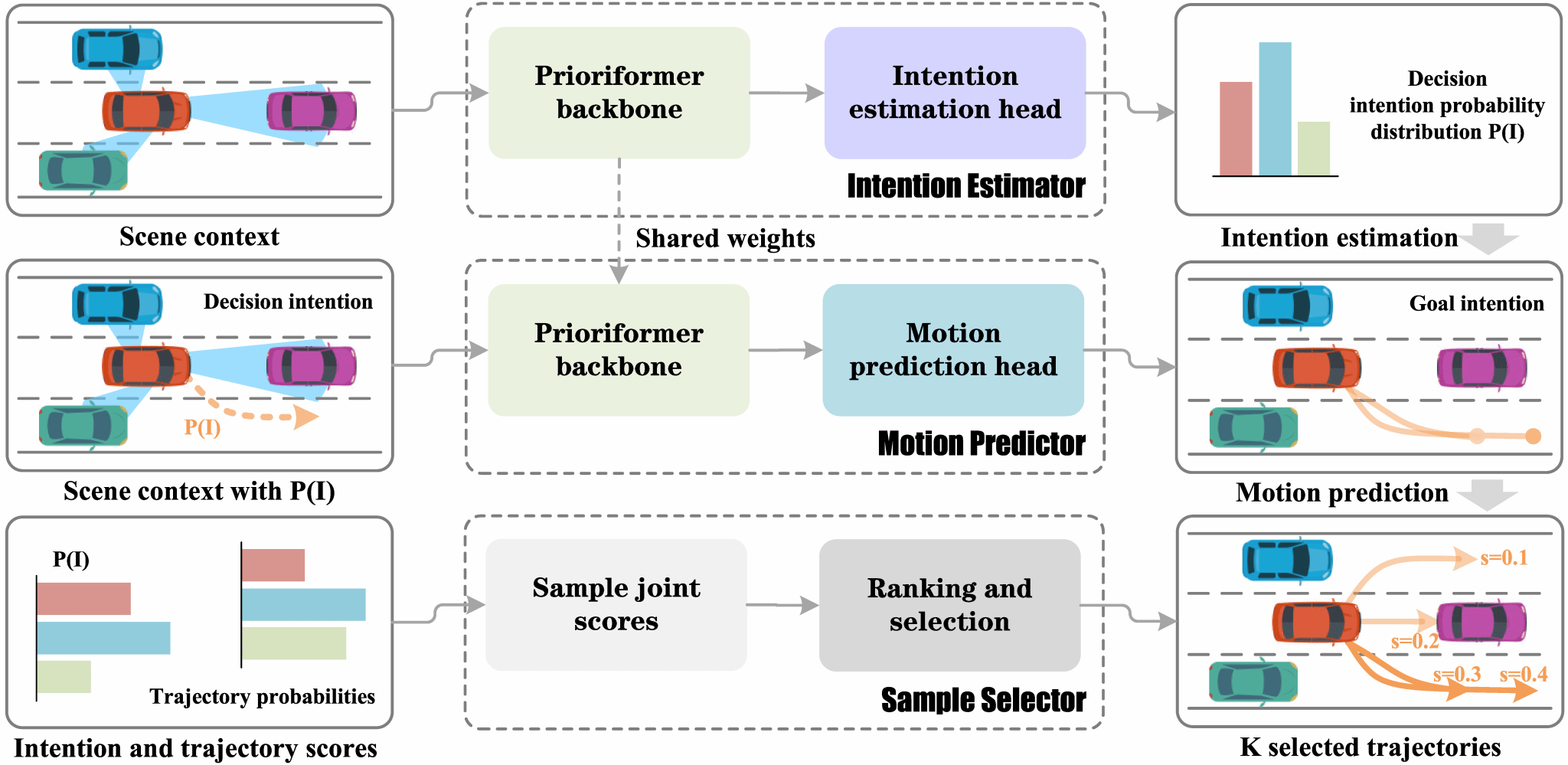
图1. 从意图解耦到运动预测的I2T系统框架
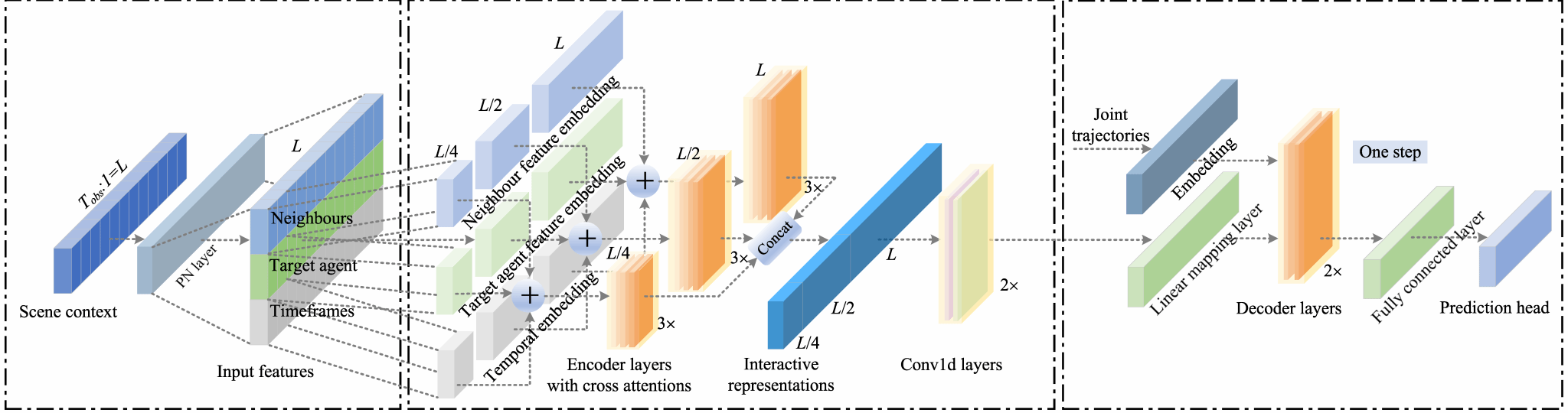
图2. 提出优化的Prioriformer网络结构
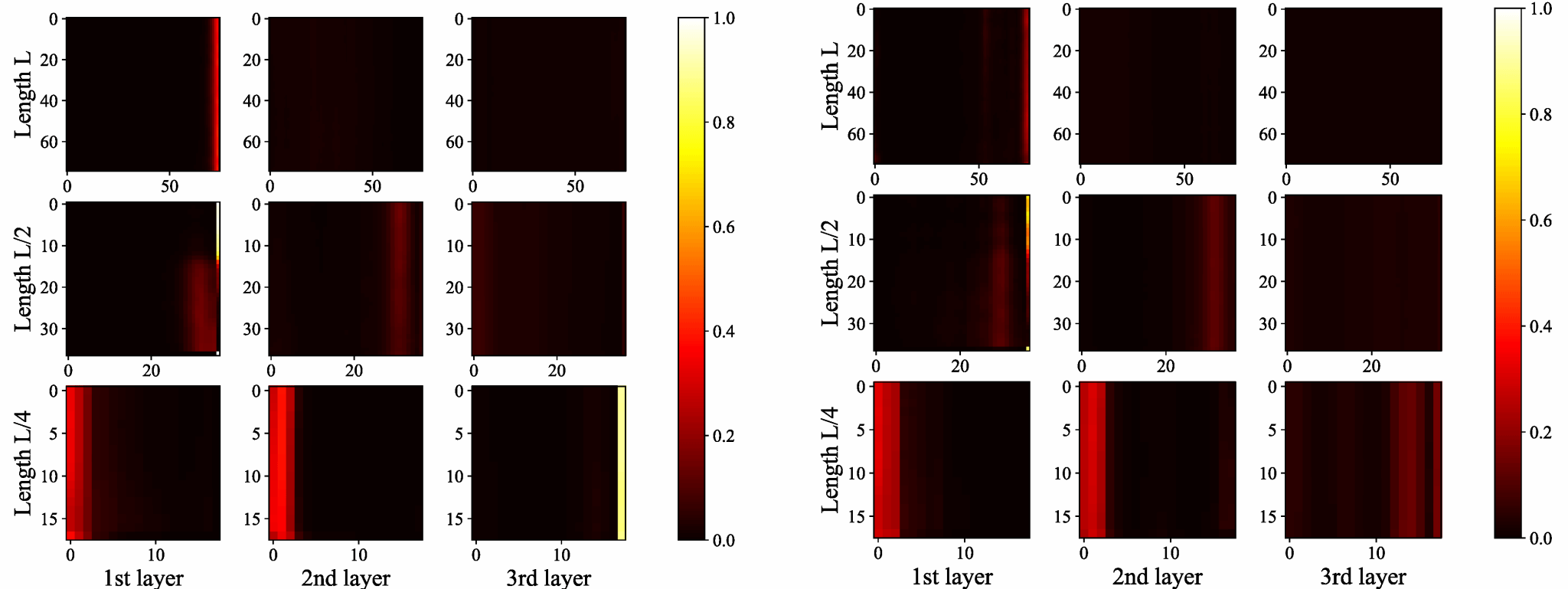
图3. 意图估计器与运动预测器的注意力分数矩阵
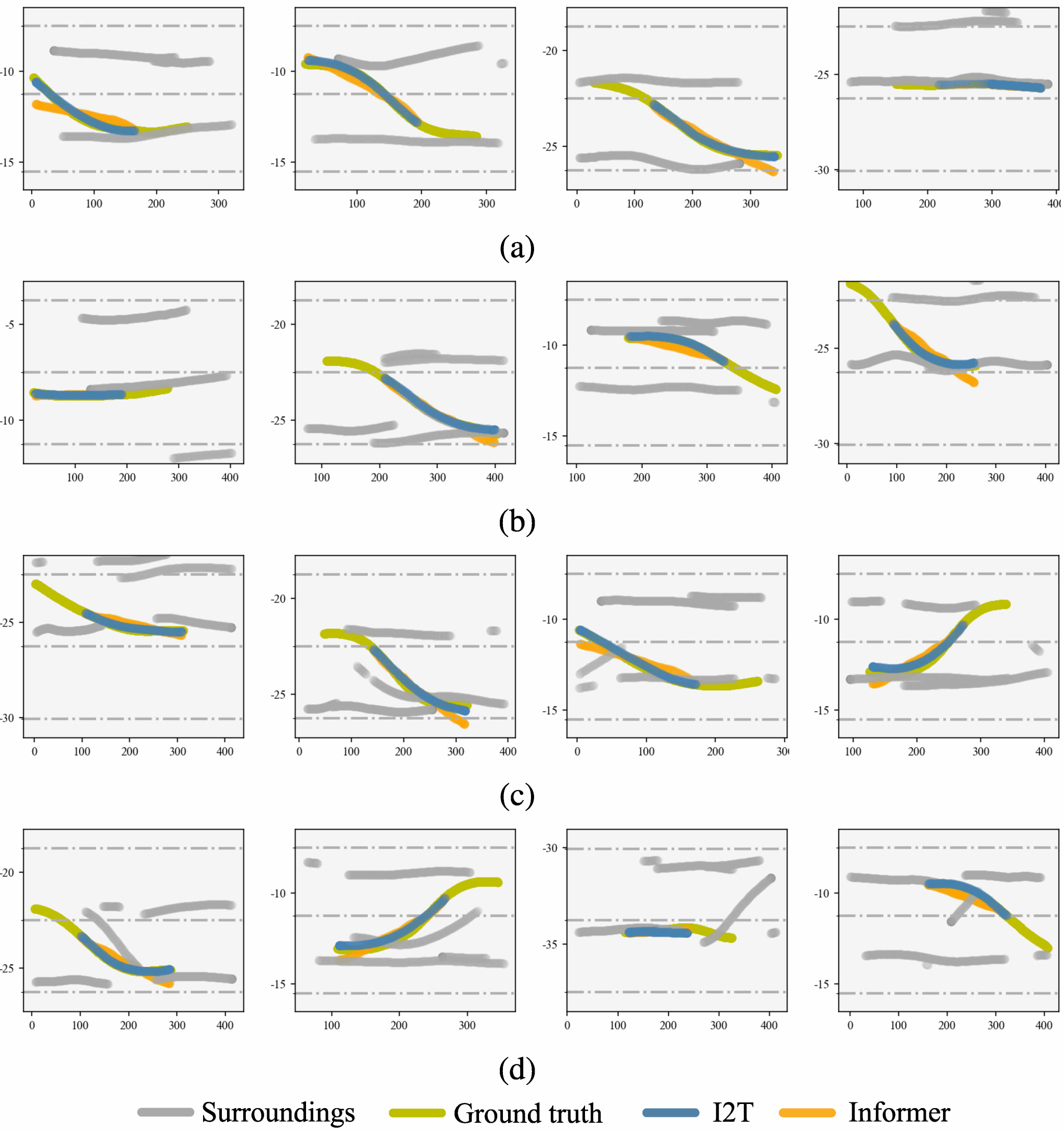
图4. 运动轨迹预测相关结果

图5. 多模态运动预测验证结果
论文提出一种从意图解耦到运动预测的新范式,以解决运动的长期预测性能差、多模态预测可扩展性和效率低的问题。I2T将目标车辆的长期意图解耦为决策意图和目标意图,然后将多模态轨迹的联合分布分解为意图空间的边际分布和轨迹空间的条件分布,从而将其复杂性降低为易处理的单模态分布。驾驶过程中意图线索和未来运动之间的长期依赖性自然延伸到I2T的内部共享机制上,从而允许运动轨迹的长期预测受益于意图估计器的训练和指导。所设计的Prioriformer网络在I2T中高效运行,以准确捕捉与意图估计和运动预测相关的长期依赖耦合。与传统的基于意图桥接的方法相比,I2T实现了多模态运动预测在可扩展性、准确性和效率上的改进。
河南大学人工智能学院为该论文的第一单位,协同控制团队周毅教授为第一作者,宁念文老师为通讯作者,中国工程院外籍院士、加拿大三院院士Sherman Shen教授对论文给予充分指导和支持。该研究工作为河南大学、河南省车联网协同技术国际联合实验室、加拿大女王大学、加拿大滑铁卢大学的联合研究成果,受到国家自然科学基金面上项目、国家重点研发计划“政府间国际科技创新合作”重点专项等项目的支持。
论文链接:https://ieeexplore.ieee.org/document/10477682



微信扫码关注
